Avec cette huitième leçon, nous achèverons notre cycle consacré aux mathématiques modernes précantoriennes (1827-1858 : Gauss-Cauchy-Galois-Hamilton-Riemann-Dedekind).
La théorie riemannienne des variétés constituant un envoi de toute la géométrie moderne et contemporaine, nous ne pourrons qu’y introduire : des trois dimensions cumulatives (topologique, différentielle et géométrique) qui structurent cette théorie, nous n’examinerons en détail que la première, nous contentant ensuite d’esquisser les deux autres.
Nous conclurons alors ce cycle par une caractérisation synthétique de ces mathématiques modernes précantoriennes selon six traits distinctifs.
Surfaces de Riemann et variétés
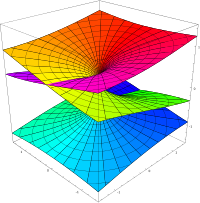
Surface de
Riemann de la racine cubique complexe
Gauss→Riemann
Riemann radicalise l’ouverture vers la
géométrie moderne que Gauss a opérée en 1827 : lorsque ce dernier avait
dégagé une notion intrinsèque de courbure (qui ne dépendait plus d’un regard
en extériorité sur la surface considérée, d’un point de vue de Sirius), Riemann
vient caractériser les surfaces de manière désormais entièrement immanente en
abolissant l’idée même d’un espace ambiant conçu comme théâtre passif d’activités
en surface : la surface n’est plus un monde (en 2D) contenu dans un univers
plus vaste (en 3D) mais un univers à elle toute seule.
Pour cela, il cumule trois gestes :
1)
il radicalise le geste de Gauss en substituant intégralement une
formalisation paramétrique (intrinsèque) à l’ancienne formalisation fonctionnelle
(extrinsèque) des surfaces ;
2)
il généralise les surfaces à deux dimensions aux hypersurfaces
à n dimensions ;
3) il adjoint des
atlas intrinsèques aux (hyper)surfaces pour les étendre en des variétés.
Idée directrice
La démarche de Riemann s’appuie sur le fait moderne
que les fonctions complexes viennent systématiquement mettre à l’ordre du jour des
fonctions multiformes (fonctions à plusieurs résultats, contrairement
aux fonctions uniformes classiques). Riemann propose alors de remplacer
les différentes surfaces d’une même fonction multiforme par une seule surface
plurielle (dite de Riemann) devenue uniformément paramétrable : autrement
dit, une pluralité de surfaces est remplacée par une surface plurielle
(l’unité arithmétique d’une pluralité numérique mute en l’unité géométrique
d’une surface à plusieurs couches).
Cette surface de Riemann pourra alors, à
certaines conditions, être dotée d’un atlas endogène en sorte de devenir une variété
proprement dite (Mannigfaltigkeit).
Trois grandes étapes
Nous étudierons la théorie des variétés selon
leur caractérisation contemporaine (la clarification théorique a pris un
siècle) comme étant des (hyper)surfaces topologiques, lisses et métriques.
Nous prendrons d’abord le temps de détailler
ce que « variété topologique » veut dire : c’est un « espace
topologique séparé à base dénombrable et localement euclidien ». Puis,
nous esquisserons les deux grandes étapes suivantes :
-
l’infinie différentiabilité autorisant de doter ces variétés d’un
ensemble de cartes dénommé atlas ;
- la donation ultime d’une
métrique (via un produit scalaire formalisant le jeu de la règle et du
compas sur cet espace) caractérisant une géométrie intrinsèque.
Variétés « topologiques »
La topologie constituant le langage moderne
de l’analyse, nous nous y attarderons avant d’examiner comment elle intervient
dans la constitution d’une variété topologique.
Les voisinages
Des quatre manières équivalentes de définir
une famille topologique de parties sur un ensemble donné (par les ouverts, les
fermés, les voisinages et les adhérences), nous privilégierons la définition
par les voisinages car celle-ci
1.
est plus intuitive,
2.
caractérise le local en l’arrimant à un point central ;
3.
et s’accorde ainsi mieux à nos interprétations intellectuelles (la
figure du point subjectif à fidèlement tenir y est en effet centrale).
Portée logique
Nous examinerons au passage la portée
proprement logique des considérations topo-logiques
précédentes puisque l’algèbre moderne formalise :
-
l’opposition des contradictoires (respectant les deux principes
de non-contradiction et du tiers exclu) selon l’algèbre de Boole des parties
(le contradictoire d’une partie est sa partie complémentaire) ;
-
l’opposition des contraires (ne respectant que le principe de
non-contradiction) selon l’algèbre de Heyting des ouverts (le
contraire d’une partie est le plus grand ouvert disjoint) ;
- l’opposition des subcontraires
(ne respectant que le principe de tiers exclu) selon l’algèbre de Brouwer
(ou de coHeyting) des fermés (le subcontraire d’une partie est le plus
petit fermé complémentant).
Autres notions topologiques
Nous profiterons alors de l’axiomatisation topologique
des voisinages pour avancer notre propre axiomatisation topologique de la
notion de région, médiation décisive dans la dialectique du local et du
global.
Nous continuerons en dégageant, sur cette base topologique, les notions de limite et de continuité.
Nous aboutirons ainsi à la notion d’homéomorphisme (bijection bicontinue) ce qui nous permettra de dégager des classes d’équivalence entre application continues (homotopie) ou linéaires (homotopie) sur ces espaces. Mais à ce stade, on n’aura pas encore de calcul différentiel et intégral (une différentielle n’est pas invariante par homéomorphisme). D’où la suite.
Variétés lisses
Si l’on suppose que les homéomorphismes
précédents sont infiniment différentiables (difféomorphismes C∞),
on pourra adjoindre à la variété topologique un ensemble de cartes dénommé atlas.
Avec cela, on disposera également des notions d’immersion et de
plongement, d’orientabilité et de parallélisabilité, mais on n’aura pas encore
de courbure (la différentielle ne présuppose pas de métrique).
Variétés de Riemann proprement dites
D’où la dernière étape dotant la variété
lisse précédente d’un produit scalaire qui la géo-métrise
(en la nantissant de distances et d’angles intrinsèquement définis) et lui
confère des propriétés métriques intrinsèques (dont la courbure).
Interprétation intellectuelle
La portée
intellectuelle de cette formalisation mathématique se concentrera pour nous sur
les questions suivantes : qu’est-ce qu’un espace intrinsèque de pensée et comment
y constituer un point d’intervention susceptible de composer différentiellement
le lieu régional d’une action restreinte à ambition globale ?
On rehaussera
l’actualité de ces interrogations pour les différentes modernités
contemporaines, confrontées à l’incessant travail de sape des déconstructions
postmodernes.
Traits distinctifs de la première modernité
Nous conclurons
cette année par un bilan synthétique de la modernité mathématique
pré-cantorienne en la caractérisant par six traits distinctifs (au regard des mathématiques
classiques qui les ont précédées).
1) La modernité
mathématique [Gauss-Riemann…] découpe des situations (totalisations
partielles intrinsèquement autonomes) comme lieux de travail pour la pensée
mathématique sans passer par l’hypothèse classique d’une vaste Totalisation préalable.
2) La modernité
mathématique [Dedekind…] invente une nouvelle manière de révolutionner une
situation donnée, non plus simplement par abandon-déplacement ou
destruction-reconstruction mais par adjonction-extension endogène.
3) Pour l’algèbre moderne
[Galois…], les groupes sont constituants de leurs éléments et non plus (comme
dans l’algèbre classique jusqu’à Lagrange) constitués par eux : métaphoriquement
dit, l’organisation moderne relève d’un groupement créateur de ses membres, non
de la sélection d’individualités préexistantes pour former un collectif (une
« équipe » !).
4) Pour la mathématique
moderne [Cauchy-Hamilton…], il convient de penser une situation du point de
ses possibilités et de ses potentialités, et pas seulement (position
classique) de ses effectivités (de ses « faits »).
5) L’action moderne
[Cauchy…] se concentre sur sa dimension régionale ou restreinte (conçue
comme médiation dialectique entre le local et le global).
6) Plus globalement, la
modernité mathématique privilégie la pensée en intériorité sur la pensée
en surplomb, l’immanence des causes internes sur la transcendance de causes
externes.
Prolongement…
In fine, nous esquisserons une prolongation de ces
leçons centrée désormais sur la géométrie différentielle et pas seulement sur la
géométrie algébrique.